Os dispositivos robóticos estão presentes no cotidiano e, dentro das casas, atuam em múltiplas funções: como aspiradores de pó, assistentes virtuais, reprodutores de multimídia, entre outras. Mas e se o seu animal de estimação estiver inspirando a construção de robôs que poderão desempenhar papéis muito mais complexos? A pergunta soa estranha à primeira vista, mas a inteligência artificial e outros avanços tecnológicos podem torná-la realidade. Resultados recentes de projetos em andamento indicam isso.
Cientistas da Alemanha desenvolveram um cachorro robótico que aprendeu a caminhar em apenas uma hora graças a um mecanismo que se assemelha à coluna espinhal de alguns animais. Já pesquisadores da China fabricaram pequenos robôs em forma de peixe que limpam o plástico do oceano. Há, ainda, um microscópico caranguejo criado por uma equipe americana que, controlado de modo remoto, tem potencial para destruir células cancerígenas.
Filipe Tôrres, doutorando em engenharia elétrica na Universidade de Brasília (UnB) e membro do Instituto de Engenheiros Eletricistas e Eletrônicos (IEEE), diz que a produção de animais robóticos é uma tendência, e que a expectativa é de que surjam soluções ainda mais diversas principalmente na área médica. "Os robôs animais podem participar em terapias, como 'cães e gatos' terapêuticos, e até mesmo em abordagens invasivas de alta complexidade. Por exemplo, nadadores para nanotecnologias", lista.
É justamente o que está sendo desenvolvido por engenheiros da Universidade de Northwestern, nos Estados Unidos, que se dedicam ao que chamam de a menor estrutura robótica de todos os tempos. A solução inovadora foi projetada com a forma de um caranguejo da espécie Cancer irroratus, comum em territórios da costa leste da América do Norte. "Esses microrrobôs poderão atuar como assistentes cirúrgicos para limpar artérias entupidas, estancar hemorragias internas ou eliminar tumores cancerígenos. Tudo em procedimentos minimamente invasivos", exemplifica John A. Rogers, especialista em nanotecnologia e líder do projeto.
Para chegar ao tamanho reduzido, a equipe, primeiro, fabricou protótipos das estruturas de caranguejo em figuras geométricas planas. Em seguida, ligou esses moldes a um substrato de borracha levemente distendido. Quando o substrato distendido é relaxado, ocorre um processo de encurvadura controlada, fazendo com que o caranguejo tome formas tridimensionais bem definidas. Dessa forma, o minúsculo robô pode se movimentar por meio da sua capacidade elástica.
Por meio desse método, o grupo conseguiu projetar dispositivos de diferentes formas e tamanhos. No entanto, a dúvida é: Por que caranguejos? "Com essas técnicas de montagem e conceitos de materiais, podemos construir robôs ambulantes com quase todos os tamanhos ou as formas 3D", respondeu Rogers. "Mas os alunos se sentiram inspirados e se divertiram com os movimentos laterais dos pequenos caranguejos. Foi um capricho criativo", brincou o pesquisador.
A equipe também construiu minirrobôs inspirados em minhocas, grilos e besouros. Detalhes do trabalho foram apresentados na revista Science Robotics. O próximo passo é inserir marcadores digitais nos protótipos para aferir diversos parâmetros. "Por exemplo, biomarcadores de saúde e capacitores de comunicação sem fios para transmitir a informação gerada a um computador", indica Rogers.
O especialista prevê que esses dispositivos passarão a agir cada vez mais com autonomia. "Os seres humanos controlam os movimentos dos robôs tal como são atualmente concebidos. No futuro, gostaríamos de lhes permitir que se movam por si próprios, tomem decisões e executem tarefas".
Aprendendo a andar
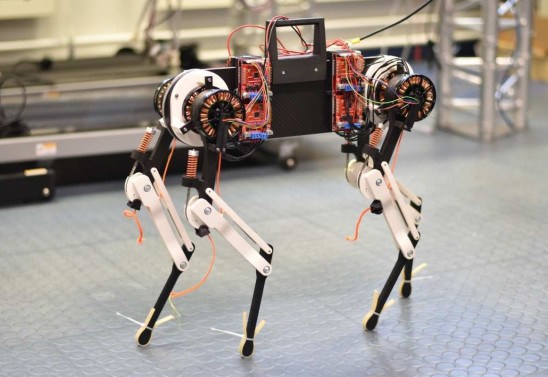
Um cão-robô apresentado por cientistas do Instituto Max Planck para Sistemas Inteligentes (MPI-IS), na Alemanha, demonstra ter potencial para tamanha autonomia. Apelidado de Morti, ele aprendeu a andar em menos de uma hora. A façanha se deu graças à mecânica idêntica aos pés de um animal quadrúpede, aliada à inteligência artificial, o que o permitiu receber reflexos e, dessa forma, se orientar para adaptar os movimentos com eficácia.
O algoritmo trabalha de forma análoga ao geradores de padrão central (GPCs), redes de neurônios interligados presentes na medula espinhal e responsáveis pela geração de padrões rítmicos. Esses parâmetros vão possibilitar exercer atividades que exigem coordenação motora, como correr, caminhar e piscar. Em humanos e na maioria dos animais recém-nascidos, os GPCs não estão totalmente refinados, de modo que eles caem com frequência ou nem conseguem se locomover.
Entretanto, a cada tropeço, a medula espinhal envia reflexos aos músculos, e eles são assimilados como aprendizado para os próximos movimentos. É o que aconteceu com Morti: "O computador produz sinais que controlam os motores das pernas, e o robô, inicialmente, caminha e tropeça. Os dados fluem dos sensores para a medula espinhal virtual, onde são comparados com os do GPG, que são o padrão. Se não corresponderem com o esperado, o algoritmo de aprendizado altera o comportamento da caminhada até que o robô ande bem e sem tropeçar", explica, em nota, Felix Ruppert, ex-aluno de doutorado do MPI-IS e um dos criadores da solução tecnológica, apresentada na revista Nature.
A medula espinhal virtual é colocada nas costas do robô, no lugar da cabeça. Nas patas, há sensores que fazem a captação dos dados. O computador responsável por gerir Morti, que tem o tamanho de um labrador, consome cinco watts de energia durante a caminhada, bem abaixo do consumido por outros dispositivos do tipo. A intenção do grupo é que o experimento ajude na compreensão de como bípedes e quadrúpedes se locomovem.
Essas informações ajudariam, por exemplo, na criação de próteses inteligentes ou de técnicas para a recuperação de movimentos. "Sabemos que esses CPGs existem em muitos animais e que os reflexos estão embutidos. Mas como podemos combinar ambos para que os animais aprendam movimentos com reflexos e CPGs? O modelo robótico nos dá respostas a questões que a biologia sozinha não pode responder", afirma Alexander Badri-Spröwitz, coautor do estudo.
Três perguntas para
Rogério Vitalli, diretor executivo do Instituto Avançado de Robótica
É possível prever que a nanotecnologia de microrrobôs, como a dos pequenos caranguejos, será utilizada na área médica?
São estruturas extremamente pequenas e que funcionam de forma muito rápida. Então, já tem aplicação disso na medicina, com nanorrobôs para entrar em corrente sanguínea. No futuro, a gente pode chegar em células cancerígenas, por exemplo, ou tratar qualquer tipo de doença. Então, eles (os cientistas) estão preocupados em demonstrar a pesquisa nessa característica: quanto menor, mais é difícil acessar espaços confinados. Eu posso chegar com o robô levando alguma droga, algo pra algum tratamento contra alguma doença.
O que chama a atenção do senhor no cão-robô desenvolvido pelos cientistas da Alemanha?
É um projeto muito interessante porque pode ser usado para a rede neural artificial, treinar a musculatura periódica do cérebro. A geração de tarefas rítmicas pode, sim, ajudar a prevenir doenças ou até alguma coisa pós-traumática, como caminhar e piscar os olhos. Pode-se estender essa forma de aprender que o cachorro está tendo, cair para poder andar, para qualquer coisa. Aprender um movimento, um olhar, aprender a movimentar um membro, a cabeça. Então, se está na revista Nature, realmente tem um alto grau de inovação.
E os nanopeixes? Quais seriam as perspectivas de aplicabilidade?
Esses peixes serão cardumes controlados fazendo a mesma coisa, com o objetivo de despoluir um ambiente. Então, não vão ser usados por não profissionais ou pessoas não especialistas. Pelo menos em um primeiro momento, onde a tecnologia está sendo criada. O peixe se corta e se regenera. Ainda tem a tecnologia de grafeno e toda a parte eletrônica. Isso é considerado inovação na área de robótica. E por que o peixe? Porque o peixe tem uma melhor mobilidade na água. Por isso, o robô se assemelha a um peixe, pois é baseado na natureza.
*Estagiária sob supervisão de Carmen Souza
Saiba Mais