")
Aprender a andar não é uma tarefa fácil para os animais quadrúpedes. Eles nascem como redes de coordenação muscular localizadas na medula espinhal e coordenar músculos e tendões da perna leva tempo. A questão não é muito simples de entender sem que se estude a medula dos animais e, pensando nisso, pesquisadores alemães do Instituto Max Plank de Sistemas Inteligentes criaram um robô que consegue simular o andar de filhotes para entender como ele funciona no começo da vida, quando eles ainda estão aprendendo.
"Como engenheiros e robotistas, buscamos a resposta construindo um robô que apresenta reflexos como um animal e aprende com os erros", explica Felix Ruppert, um dos autores do texto Learning Plastic Matching of Robot Dynamics in Closed-loop Central Pattern Generators, publicado nesta segunda-feira (18/7) na revista científica Nature Machine Intelligence.
O robô conseguiu o feito de aprender a andar em apenas uma hora, usando um algoritmo de otimização que orienta seu aprendizado. As informações medidas no sensor no pé dele são combinadas com os dados alvo da medula espinhal virtual modelada sendo executado como um programa no computador do robô. Ou seja, o robô aprende a andar comparando continuamente as informações enviadas e esperadas do sensor, executando reflexos e adaptando os padrões de controle motor.
Veja imagens do robô:
-
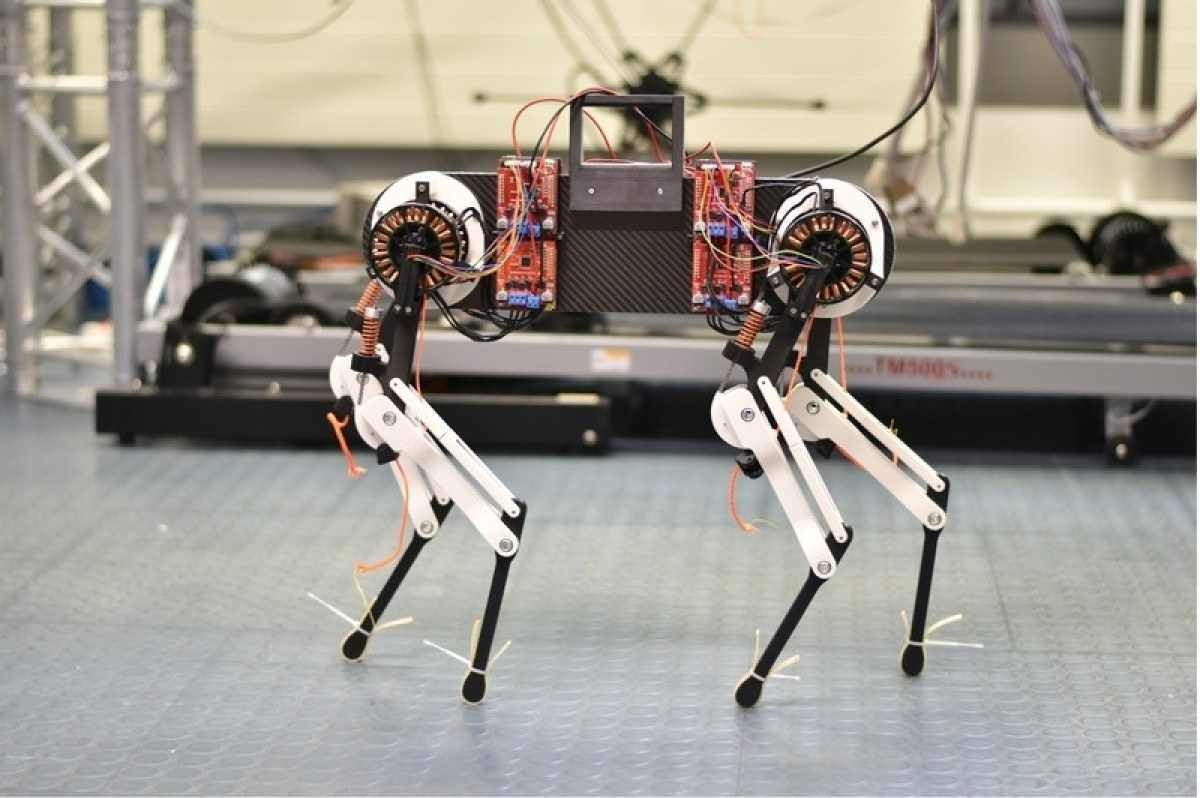
 Morti, o robô, praticamente nasceu sem saber nada sobre a anatomia de suas pernas ou como elas funcionam Felix Ruppert /Dynamic Locomotion Group
Morti, o robô, praticamente nasceu sem saber nada sobre a anatomia de suas pernas ou como elas funcionam Felix Ruppert /Dynamic Locomotion Group -
Morti, o robô praticamente nasceu sem saber nada sobre a anatomia de suas pernas ou como elas funcionam Felix Ruppert /Dynamic Locomotion Group
-
Morti, o robô, praticamente nasceu sem saber nada sobre a anatomia de suas pernas ou como elas funcionam" Felix Ruppert /Dynamic Locomotion Group

Saiba Mais
 Tecnologia
Tecnologia
 Tecnologia
Tecnologia
Algoritmo de aprendizado
Morti, o robô, tem um algoritmo de aprendizado que funciona como um Gerador de Padrão Central (CPG) que, nos humanos e animais, são redes de neurônios na medula espinhal que produzem contrações musculares periódicas sem ajuda do cérebro. São eles que ajudam em tarefas como caminhar, piscar e fazer a digestão, por exemplo.
Além disso, os reflexos são ações involuntárias do CPG desencadeadas por vias neurais codificadas que conectam sensores na perna com a medula espinhal.
Contudo, nos filhotes, os CPGs inicialmente ainda não estão bem ajustados e o animal tropeça, tanto em terrenos planos quanto irregulares e precisa de algumas tentativas para aprender definitivamente a andar.
Com Morti, a mesma situação aconteceu. "Nosso robô praticamente 'nasceu' sem saber nada sobre a anatomia de suas pernas ou como elas funcionam", pontua Ruppert. Assim, o CPG do robô é simulado em um computador pequeno e leve que controla o movimento das pernas.
Durante o processo de aprendizagem, caso o robô tropece, por exemplo, o CPG envia sinais motorizados adaptados para que o robô, a partir de então, tropece menos e otimize sua caminhada. Nesta estrutura, a medula espinhal virtual não tem conhecimento explícito sobre o design da perna do robô, seus motores e molas.
"Sabemos que esses CPGs existem em muitos animais. Sabemos que os reflexos estão embutidos; mas como podemos combinar ambos para que os animais aprendam movimentos com reflexos e CPGs? Essa é uma pesquisa fundamental na interseção entre robótica e biologia. O modelo robótico nos responde a perguntas que a biologia sozinha não pode responder", garante Alexander Badri-Spröwitz, que também assina a pesquisa.
"Não podemos pesquisar facilmente a medula espinhal de um animal vivo. Mas podemos modelar uma no robô", ressalta Alexander.
Veja o vídeo do funcionamento do robô:
Saiba Mais
-
![]() Ciência e Saúde
O que é o vírus Marburg, 'primo' do ebola que voltou a preocupar após mortes em Gana
Ciência e Saúde
O que é o vírus Marburg, 'primo' do ebola que voltou a preocupar após mortes em Gana
-
![]() Ciência e Saúde
Cientistas apostam em transplantes de órgãos de porcos para reduzir filas, mortes e gastos no Brasil
Ciência e Saúde
Cientistas apostam em transplantes de órgãos de porcos para reduzir filas, mortes e gastos no Brasil
-
![]() Ciência e Saúde
'Pensei que por ser negra não poderia ter câncer de pele'
Ciência e Saúde
'Pensei que por ser negra não poderia ter câncer de pele'
-
![]() Ciência e Saúde
Pessoas com IMC baixo não são mais ativas, apenas comem menos, conclui estudo
Ciência e Saúde
Pessoas com IMC baixo não são mais ativas, apenas comem menos, conclui estudo
 Ciência e Saúde
Ciência e Saúde
 Ciência e Saúde
Ciência e Saúde
 Ciência e Saúde
Ciência e Saúde
 Ciência e Saúde
Ciência e Saúde
Notícias pelo celular
Receba direto no celular as notícias mais recentes publicadas pelo Correio Braziliense. É de graça. Clique aqui e participe da comunidade do Correio, uma das inovações lançadas pelo WhatsApp.
Dê a sua opinião
O Correio tem um espaço na edição impressa para publicar a opinião dos leitores. As mensagens devem ter, no máximo, 10 linhas e incluir nome, endereço e telefone para o e-mail sredat.df@dabr.com.br.